

PROB Model For Waste and Garbage Object Detection

According to the World Bank's "What a Waste 2.0" report, updated in 2022, global waste generation is expected to reach 3.4 billion tons by 2050.
The report estimates that about 2.01 billion tons of municipal solid waste are produced annually worldwide.
A study published in Nature Sustainability in 2023 suggests that out of the total waste generated globally, approximately 32% has the potential to be recycled.
However, the actual global recycling rate is much lower, hovering around 13-14% due to various challenges in waste management systems.
As for why we should recycle - well, let's get real for a second. Our planet isn't exactly getting any bigger, but our trash piles sure are. Recycling isn't just some trendy eco-fad, it's our ticket to not drowning in our own garbage.
Plus, it's like giving our resources a second chance at life. Think about it - that plastic bottle you toss could come back as a cool new gadget or even part of your car.
But here's where things get really interesting. We've got these AI models that can help us sort through all this waste.
The problem is, they're great at recognizing the stuff they've seen before, but when something new pops up? They're as confused as a cat in a doghouse.
This is where Probabilistic Objectness for Open World Object Detection (PROB) comes into play. PROB tackles the limitations of traditional object detection models, which often classify unknown objects as background noise.
By integrating a probabilistic framework, PROB estimates the likelihood that an object belongs to an unknown class, rather than dismissing it.
This approach allows for better identification and classification of new waste types, bridging the gap between the known and unknown in waste management.
So, buckle up, folks! We're about to dive into how this model could revolutionize waste management in the open world.
How does it work?
The PROB model starts a complex process to accurately find and classify objects in an image of waste when it is shown to the system.
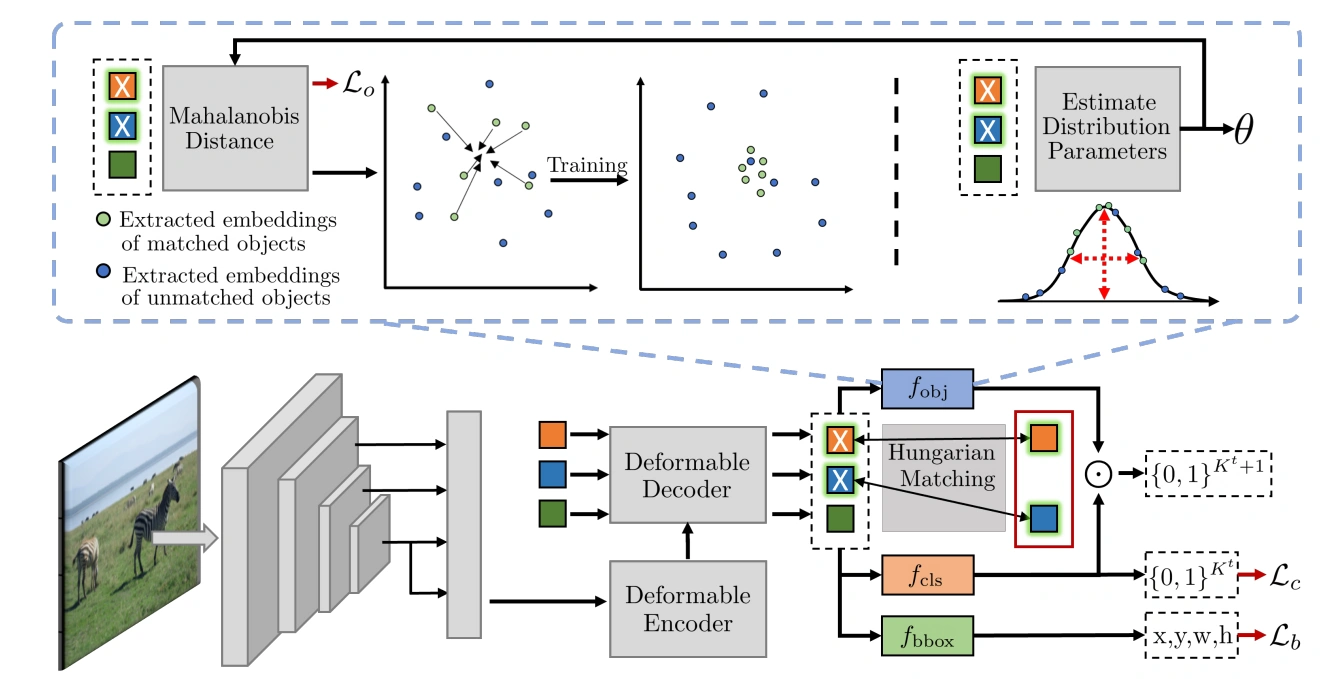
This process includes objects from categories the model has never seen before. First, the image is put into the system. It then goes through a deformable DETR (D-DETR) model, which pulls out deep features from the image.
Then, these features are turned into embeddings, which are mathematical representations of the objects in the image. Each embedding corresponds to a different area that may have different types of waste.
Its probabilistic objectness feature is what makes PROB so useful. The Mahalanobis distance is used by the model to compare the image-generated embeddings with the range of known class embeddings.
To put it more simply, the model checks how each item in the image matches or doesn't match the categories it already knows. The green dots in the architecture image show which classes of objects most closely match.
It is likely that these objects are part of those classes. However, objects (shown as blue dots) that are very different from these known distributions are marked as possible unknowns.
During training, the model tweaks these embeddings by moving them closer to the middle of known distributions, making it more likely that they will be correctly identified.
After figuring out the objectness probability, the embeddings are sent to a deformable decoder, which makes object proposals, which are predictions about which parts of the image have distinct objects.
The Hungarian matching algorithm is used to match these proposals with ground truth labels. This makes sure that the discovered objects are matched with the correct class labels in the best way possible.
The PROB model makes its final predictions with three different heads: the objectness score (𝑓𝑼𝑏𝑗f ) checks to see if an area contains an object, the classification head (𝑓𝑐𝑙𝑠f ) gives the detected object a class label and the bounding box head (𝑓𝑏𝑏𝑼𝑥f bbox) predicts the location and dimensions of the object within the image.
The PROB model can clearly tell the difference between finding objects and predicting their classes thanks to this multifaceted method, even in messy and complicated settings like waste management scenarios.
Using incremental learning to find and sort unknown classes. Dealing with the many different kinds of trash that don't always fit into clear groups is one of the hardest parts of managing trash.
With the PROB model, you can not only find objects that belong to known classes, but you can also find and sort objects that are not in its training data. These are the so-called "unknown" classes.
As soon as the model finds an object whose embedding doesn't match any of the known class distributions, it labels the object as unknown.
In this case, if a brand-new biodegradable substance shows up in the trash stream and the model has never been trained on it, it is likely that its embedding will be marked as an unknown.
Once an item is marked as unknown, the next step requires human input, which is necessary for the system to be able to change over time. Human operators look over the items that have been marked as unknown and give them correct labels.
The labeled examples are then sent back to the model so that it can learn from them and spot these new classes in future images. This process, called gradual learning, is very important for the model to keep getting better.
That's because the PROB model gets better at finding and sorting a wide range of waste by slowly adding new classes to its training data. This makes sure that it stays useful and useful in changing environments.
It is very important to be able to find and include new classes in garbage management, since the types and groups of waste can change over time as new materials and recycling technologies come out.
Putting a person in the loop makes sure that the system is not only correct, but also flexible and able to change with the business it works in.
This dynamic learning process makes it possible to make a waste management system that is more responsive and efficient, and that can handle the complex garbage streams of today with more accuracy and adaptability.
Conclusion
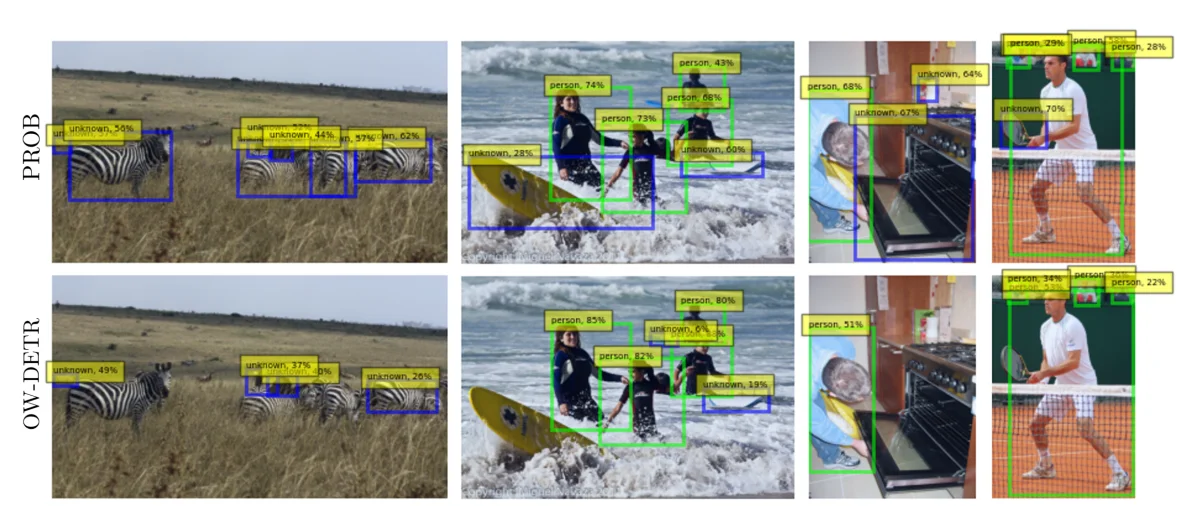
In this article, we explored the PROB model's capabilities in object detection and the identification and sorting of unknown classes across various domains, including retail, autonomous driving, and waste management.
While the model performed reasonably well on the MS-COCO dataset, which it was pretrained on, its ability to generalize to other datasets was limited.
The challenges encountered, particularly in dense and complex scenes, highlight the need for further fine-tuning and adaptation to specific domains.
The PROB model's innovative approach to probabilistic objectness offers promise in open-world object detection, particularly in scenarios where new classes may emerge over time.
However, its current limitations in handling diverse datasets and accurately predicting classes in novel environments indicate that more work is needed to enhance its robustness and versatility.
FAQ
1. What is object detection in the context of waste management?
Object detection in waste management involves using artificial intelligence (AI) and machine learning models to identify, classify, and sort various types of waste automatically.
This technology helps in efficiently separating recyclables from non-recyclables and reduces the manual labor required in sorting facilities.
2. How does the integration of object detection and segmentation models benefit waste management facilities?
By combining object detection with instance segmentation, waste management facilities can achieve more detailed and accurate sorting of waste materials.
This leads to higher recycling rates, reduced landfill use, and more effective resource recovery, ultimately contributing to environmental sustainability.
3. What challenges exist in applying object detection to waste management, and how are they being addressed?
One of the main challenges is the variability and complexity of waste materials, which can make accurate detection difficult.
However, technologies like PROB address this by enabling the detection of unknown objects, and ongoing advancements in AI continue to improve the robustness and adaptability of these systems.
References

Simplify Your Data Annotation Workflow With Proven Strategies
.png)
