

PROB Model For Open World Object Detection: A Step-By-Step Guide

In our previous article, we discussed the revolutionary potential of open-world object detection and the challenges associated with identifying and categorizing unknown classes using the PROB model.
In this follow-up, we shift our focus to the PROB model, a cutting-edge solution designed to tackle these challenges across various domains, including retail, autonomous driving, and waste management.
While the PROB model exhibited commendable performance on the MS-COCO dataset, benefiting from pretraining on this extensive dataset, it encountered significant difficulties when applied to more complex and diverse environments.
These challenges underscore the importance of further refining and adapting the model to excel in domain-specific applications, where the data's characteristics can vary widely from the controlled conditions of traditional benchmarks.
Configuring the PROB model for open-world object detection involves several essential steps that ensure accurate inference and evaluation across various datasets.
Whether focusing on waste management, retail, or autonomous driving, following these steps will help you get the model up and running effectively.
1. Set Up Python Environment
Begin by ensuring your Python environment is properly configured with all necessary dependencies. This includes essential libraries like PyTorch for deep learning and CUDA for GPU acceleration.
Proper setup of these components is crucial for the model's performance, particularly when dealing with large datasets or real-time applications.
2. Add the Backbone Model
The backbone model is the foundation of the PROB model, responsible for initial feature extraction from the input images.
To proceed, download the appropriate pretrained backbone model such as Deformable DETR (D-DETR) and place it in the models directory of your project. This step is vital as it forms the core of the PROB model’s object detection capabilities.
3. Compile CUDA Operators
For efficient processing, especially with high-resolution images or large-scale datasets, compiling CUDA operators is necessary.
These operators leverage GPU resources to accelerate computation, making the inference process faster and more efficient.
4. Prepare the Dataset
Next, organize and prepare your dataset according to the format required by the PROB model.
This typically involves structuring your data into specific directories and ensuring that annotations are correctly formatted, whether in COCO or Pascal VOC style.
This step is particularly important for domain-specific datasets, such as those used in waste management or retail, to ensure that the model can correctly interpret and process the data.
5. Run the Evaluation
With everything set up, you can now proceed to evaluate the model. This involves executing scripts that perform inference on your dataset using the PROB model.
Make sure to adjust the configuration files to match your dataset and modify parameters like batch size or learning rate as needed. To run the evaluation, use the following commands:
chmod +x configs/EVAL_M_OWOD_BENCHMARK.sh
bash configs/EVAL_M_OWOD_BENCHMARK.sh
Post-Evaluation Tasks
After completing the evaluation, several post-processing steps can help refine the results. First, save the model’s output in a JSON file for easy access and analysis.
Next, consider visualizing the predictions by overlaying bounding boxes on the images, allowing you to assess the accuracy of the model's detections.
Finally, enhance the model’s precision by filtering out overlapping boxes, a crucial step when dealing with cluttered scenes or closely packed objects.
Understanding the PROB Model
The PROB model is an adaptation of the Deformable DETR (D-DETR) specifically designed for open-world object detection.
It introduces a probabilistic objectness head, which significantly improves the model's ability to handle unknown objects, a common challenge in open-world scenarios.
Probabilistic Objectness
Unlike traditional object detection models, PROB separates the prediction of whether an object exists (p(o|q)) from the task of classifying that object (p(l|o,q)).
Here, q represents the query embedding generated by the model. This separation allows PROB to manage unknown objects more effectively, as it doesn't rely on labeled data during training for objectness scores.
Mahalanobis Distance for Objectness
To determine whether a query embedding represents an object, PROB uses the Mahalanobis distance, which measures the similarity between the query embedding and the embeddings of known objects.
This probabilistic approach enables the model to detect unknown objects based on how their embeddings relate to those of known classes, providing a more robust detection mechanism.
Incremental Learning
One of PROB’s key features is its ability to incrementally learn new objects without forgetting previously learned ones—a critical capability for open-world detection. The model achieves this by maintaining a small set of exemplars, or images with known objects, which it uses to fine-tune its predictions.
By selecting difficult instances based on their objectness scores, PROB can improve its performance on newly introduced objects while preserving its knowledge of existing classes.
Human-in-the-Loop
In scenarios where the model encounters unknown objects, human input becomes essential. This feedback loop allows users to label new objects flagged by the model, enabling it to learn and incorporate these new classes into its knowledge base.
Over time, this iterative process enhances the model’s ability to operate in dynamic, open-world environments.
Results
We evaluated the PROB model across multiple datasets from various sectors, including retail, waste segregation, vehicle detection, and the widely recognized MS-COCO dataset.
The performance of the model varied significantly across these different domains, reflecting its strengths and limitations in handling diverse visual environments.
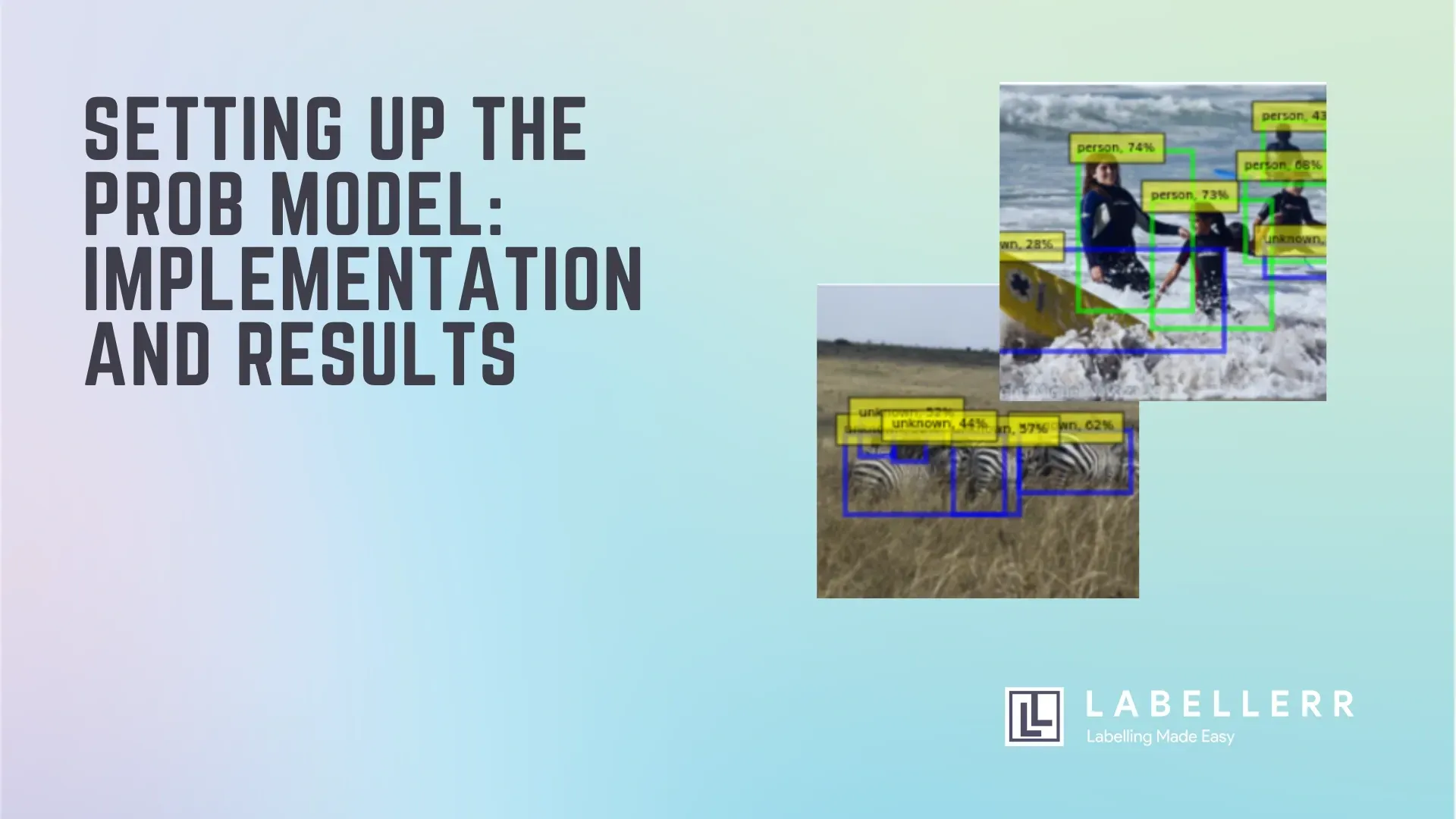
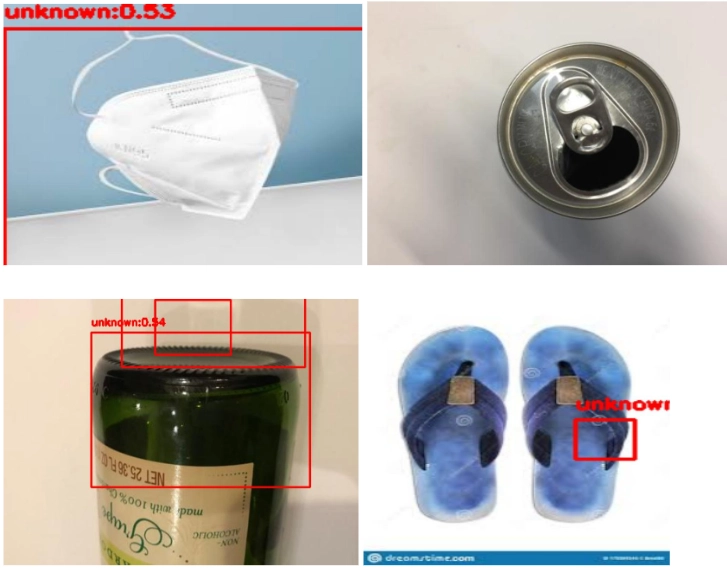
Predictions on MS-COCO Dataset
The PROB model showed the best performance on the MS-COCO dataset, which is expected given that the model was pre-trained on this dataset.

MS-COCO contains a large variety of objects across 80 different classes, and the model’s ability to detect and classify these objects was relatively strong.
The model effectively handled images where objects were distantly placed, minimizing overlap and enabling more accurate predictions.

However, the performance diminished when objects were closely packed or partially occluded, leading to overlapping bounding boxes and less precise classifications.
Despite these challenges, the model's familiarity with the COCO dataset's classes allowed it to maintain a decent level of accuracy.
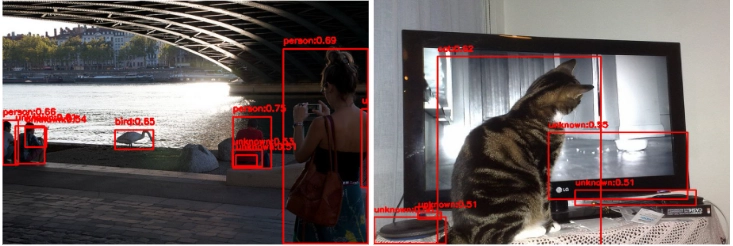
Predictions on Retail Dataset

When tested on the retail dataset, the model's performance dropped noticeably. Retail environments often involve closely situated objects with complex textures and varying lighting conditions, which poses a challenge for the PROB model.
The pre-trained weights, while effective on MS-COCO, struggled to generalize to this new context. As a result, the model frequently misclassified objects or failed to detect them entirely.
Additionally, the high degree of overlap between items on store shelves led to numerous false positives and imprecise bounding boxes, highlighting the model's limitations in dense, cluttered scenes typical of retail settings.
Predictions on Autonomous Driving Dataset

In the domain of autonomous driving, the model encountered difficulties, especially in accurately detecting and classifying vehicles and pedestrians in dynamic environments.
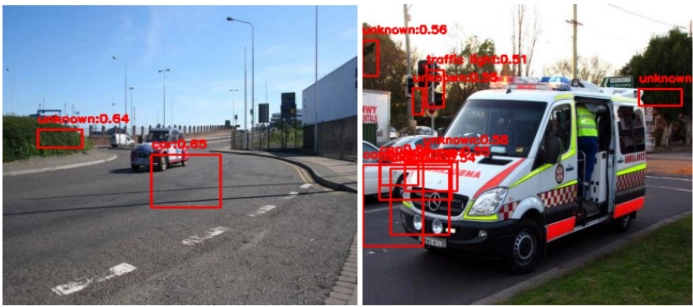
The autonomous driving dataset, characterized by varying scales, occlusions, and high-speed motion, proved challenging for the PROB model.
The detection of vehicles was particularly problematic in situations where multiple cars were close together or when the scene included a single, isolated vehicle.
These scenarios led to either overlapping bounding boxes or a complete failure to detect the vehicle. The model's struggles in this context underscore the need for further fine-tuning and adaptation to handle the complexities of real-world driving scenarios.
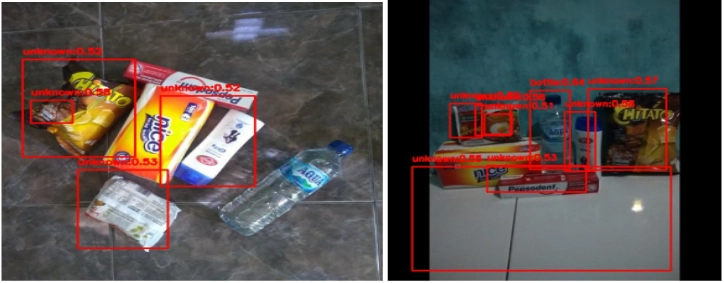
Predictions on Waste Management Dataset
The performance of the PROB model in waste management was similarly disappointing. Waste images often contain a mix of materials with irregular shapes and varying textures, making object detection a significant challenge.
The model's inability to generalize beyond its pre-trained classes led to poor detection rates for waste objects. Even when the model detected an object, it often misclassified it, particularly in images where different types of waste were closely packed together.
The complexity and diversity of waste materials highlighted the model's struggles in adapting to new and unfamiliar classes without further training and fine-tuning.
Similar to the retail and vehicle datasets, the model's performance on waste segregation images is subpar.
While it performs adequately on images with distinct, separated objects, it struggles in cluttered scenes typical of waste management.
The bounding boxes are often loose and sometimes random, indicating that the model requires further training or adaptation to handle the complexities of this domain effectively.
Conclusion
In conclusion, the PROB model offers a promising approach to open-world object detection, particularly with its probabilistic objectness framework and incremental learning capabilities.
However, its performance varies significantly across different datasets. While it excels on the COCO dataset, which it was trained on, the model struggles to generalize to other domains such as retail, vehicle detection, and waste management.
These challenges highlight the need for further fine-tuning and domain-specific adaptations to enhance the model’s robustness and accuracy across diverse applications.
With continued development and integration of human feedback, the PROB model has the potential to become a powerful tool for open-world object detection across various industries.
FAQ
1. What is object detection in the context of waste management?
Object detection in waste management involves using artificial intelligence (AI) and machine learning models to identify, classify, and sort various types of waste automatically.
This technology helps in efficiently separating recyclables from non-recyclables and reduces the manual labor required in sorting facilities.
2. How does the integration of object detection and segmentation models benefit waste management facilities?
By combining object detection with instance segmentation, waste management facilities can achieve more detailed and accurate sorting of waste materials.
This leads to higher recycling rates, reduced landfill use, and more effective resource recovery, ultimately contributing to environmental sustainability.
3. What challenges exist in applying object detection to waste management, and how are they being addressed?
One of the main challenges is the variability and complexity of waste materials, which can make accurate detection difficult.
However, technologies like PROB address this by enabling the detection of unknown objects, and ongoing advancements in AI continue to improve the robustness and adaptability of these systems.
References

Simplify Your Data Annotation Workflow With Proven Strategies
.png)
