

AI-Powered Real-Time Guidance for the Visually Impaired
Navigating around can be difficult for visually impaired individuals. This article explores how AI-powered wearable devices could help them move and gather information for surroundings

According to the World Health Organization, over 2.2 billion people worldwide experience some form of vision impairment, with millions relying on mobility aids.
Urbanization trends further complicate navigation as cities grow denser and less predictable.
Navigating city sidewalks safely is challenging for everyone, but it presents unique and significant challenges for blind individuals.
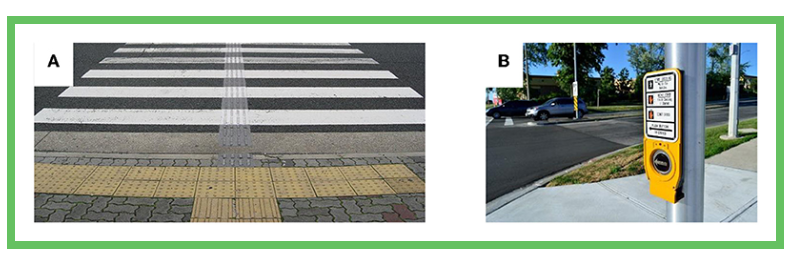
While guide dogs, canes, and tactile feedback tools help, they can’t always offer the level of guidance needed to navigate busy sidewalks, avoid obstacles, or interact with fast-changing environments.
Visually impaired individuals need innovative tools to confidently navigate and maintain independence.

Recent advancements in AI and vision technology could make a new kind of solution possible: a wearable companion device that would provide real-time guidance, enhancing mobility and independence for blind individuals.
This blog explores what it might take to make such a device a reality, from the technologies involved to the challenges we’d need to overcome in data collection, processing, and user customization.
Why This Problem Needs Solving?
Navigating urban environments poses significant challenges for visually impaired individuals, ranging from physical obstacles to ever-changing surroundings.
Despite the availability of tools like canes and guide dogs, these aids have limitations in dynamic and complex environments such as busy sidewalks or construction zones.

Why solve this problem now?
The rapid advancement of AI, machine learning, and wearable technology offers an unprecedented opportunity to address these challenges. By developing real-time assistive devices, we can bridge the gap between safety, independence, and accessibility, improving quality of life for millions.
The Vision for a Companion Device for visually Impaired Individuals
Imagine a wearable device—lightweight, compact, and designed to fit seamlessly into a blind person’s everyday attire.
This device would act as a real-time navigation assistant, alerting the user to obstacles, helping them stay on a safe path.
Such a system could revolutionize urban mobility for blind individuals, helping them navigate with confidence and ease.
For this vision to become a reality, the device would need to reliably interpret the user’s surroundings, identify potential hazards, and provide intuitive guidance—all without overwhelming the user with unnecessary information.
Challenges in Developing a Real-Time Guidance Device
Operational Challenges
- Data Collection: Capturing diverse RGB and depth images in various weather conditions, crowded areas, and terrains is complex and requires robust equipment.
- Data Diversity: Ensuring the dataset represents global urban environments and unique obstacles is essential for building an effective model.
Data Labeling Challenges
Annotation of large datasets is costly and labor-intensive, especially for complex scenes involving multiple objects and obstacles.
Technological Barriers
Developing a lightweight, energy-efficient device that can process real-time data without delays remains a significant hurdle.
Data Collection as the First Step
The first challenge in developing this device is data collection, as existing datasets often focus on road environments rather than pedestrian pathways.
To create a device that can effectively interpret sidewalks and pedestrian spaces, we need to collect new kinds of data that include both RGB (color) and depth information specific to urban settings.
To address this, a small, wearable device with a dual camera system could be developed to capture RGB and depth images.

RGB imaging records the visual details of the environment, while depth imaging provides information about distances between objects and the user.
Together, these images offer a comprehensive view, helping the AI interpret objects, obstacles, and pathways accurately. Once collected, this data will form the foundation for AI model training.
Annotating and Processing the Data for Training the Transformer Model
For the AI model to understand this data, image annotation is a crucial next step. Using image annotation tools, each image must be carefully labeled, identifying various elements like sidewalks, pedestrians, and obstacles.
This annotated data will allow the model to learn how to recognize and differentiate objects in real-world scenes. For image annotation, we can use data annotation tools.
Labellerr is one such tool. Labellerr's data labeling engine utilizes automated annotation, advanced analytics, and smart QA to process millions of images and thousands of hours of videos in just a few weeks.
After annotation, image segmentation is applied to divide images into meaningful parts, each representing a specific object or area.

Through segmentation, the model learns to distinguish between objects that are safe to approach (such as open sidewalks) and those that pose a risk (like a street sign blocking the path).
By training on this annotated and segmented data, the transformer model can develop a deep understanding of complex environments, guiding users around obstacles and highlighting safe paths.
Labellerr’s Approach: Tackling Large-Scale Data Annotation

Labellerr addresses the challenges of annotating large datasets with a combination of automation, processes, team training, and guidelines:
- Automation: AI-assisted tools speed up annotation for common cases.
- Process Optimization: Streamlined workflows ensure consistency and scalability.
- Team Training and Guidelines: Annotators are equipped with clear instructions to handle edge cases effectively.
- Addressing Edge Cases: Special emphasis is placed on rare scenarios to ensure the model can handle unexpected obstacles or complex environments.
Using Transformer-Based AI Models for Real-Time Guidance
To process this segmented data efficiently, the device would rely on a transformer-based AI model.

Known for their ability to handle complex, layered information, transformer models can interpret data from RGB and depth images in real time.
By analyzing segmented data, the transformer could detect objects, estimate distances, and determine safe routes.
For instance, if an obstacle is detected in the user’s path, the device could issue a gentle prompt or vibration, guiding the user to adjust their direction and avoid obstacles effectively.
Customizable Settings through a Smart Vision Phone Interface
For such a wearable device to be user-friendly, customization is key. An accompanying app on a smart vision-enabled phone would allow blind users to adjust settings according to their unique needs and preferences.
For instance, a user might prefer more frequent alerts in crowded settings or want the device to prioritize certain obstacles, like street signs or moving vehicles.
The app could also offer different feedback options—auditory, tactile, or visual (for users with partial sight)—allowing users to tailor the device to their preferences and environment.
Envisioning a Future with Enhanced Urban Mobility for the Blind
While developing such a device is a complex undertaking, the potential impact is enormous. This technology could significantly boost the independence and quality of life for blind individuals, enabling them to navigate cities safely and confidently.
Creating this device would require collaboration between experts in AI, data collection, image annotation tools, and user-centered design.
But the effort would be well worth it. By empowering blind individuals to navigate urban spaces independently, we can contribute to a more inclusive, accessible world for everyone.
Conclusion
With rapid advancements in AI, depth and RGB imaging, and user-centered design, we are closer than ever to making real-time assistive devices for blind individuals a reality.
Such a device has the potential to transform urban mobility, allowing blind users to move through the world with newfound freedom.
As we continue exploring these possibilities, our goal remains clear: to create a future where technology enables all individuals to lead independent, fulfilling lives, regardless of their visual abilities.
FAQs
What would an AI-powered wearable guidance device look like?
The envisioned device would be lightweight, compact, and seamlessly integrated into daily attire.
Equipped with RGB and depth cameras, it would provide real-time guidance by detecting obstacles, identifying safe pathways, and issuing alerts via vibrations, sounds, or other feedback mechanisms.
What technologies would power such a device?
- RGB and Depth Imaging: Captures detailed environmental visuals and measures object distances.
- Transformer-Based AI Models: Processes complex, layered data in real-time to recognize and react to the environment.
- Smartphone Integration: Allows users to customize settings and feedback modes via an app.
What challenges exist in developing this device?
- Data Collection: Gathering diverse RGB and depth images from various urban settings under different conditions.
- Data Annotation: Labeling large datasets with precision to train the AI effectively.
- Technological Constraints: Building a device that is lightweight, energy-efficient, and capable of real-time processing.

Simplify Your Data Annotation Workflow With Proven Strategies
.png)
